Smoothie Dispenser
Tool: C, Node.js, JavaScript
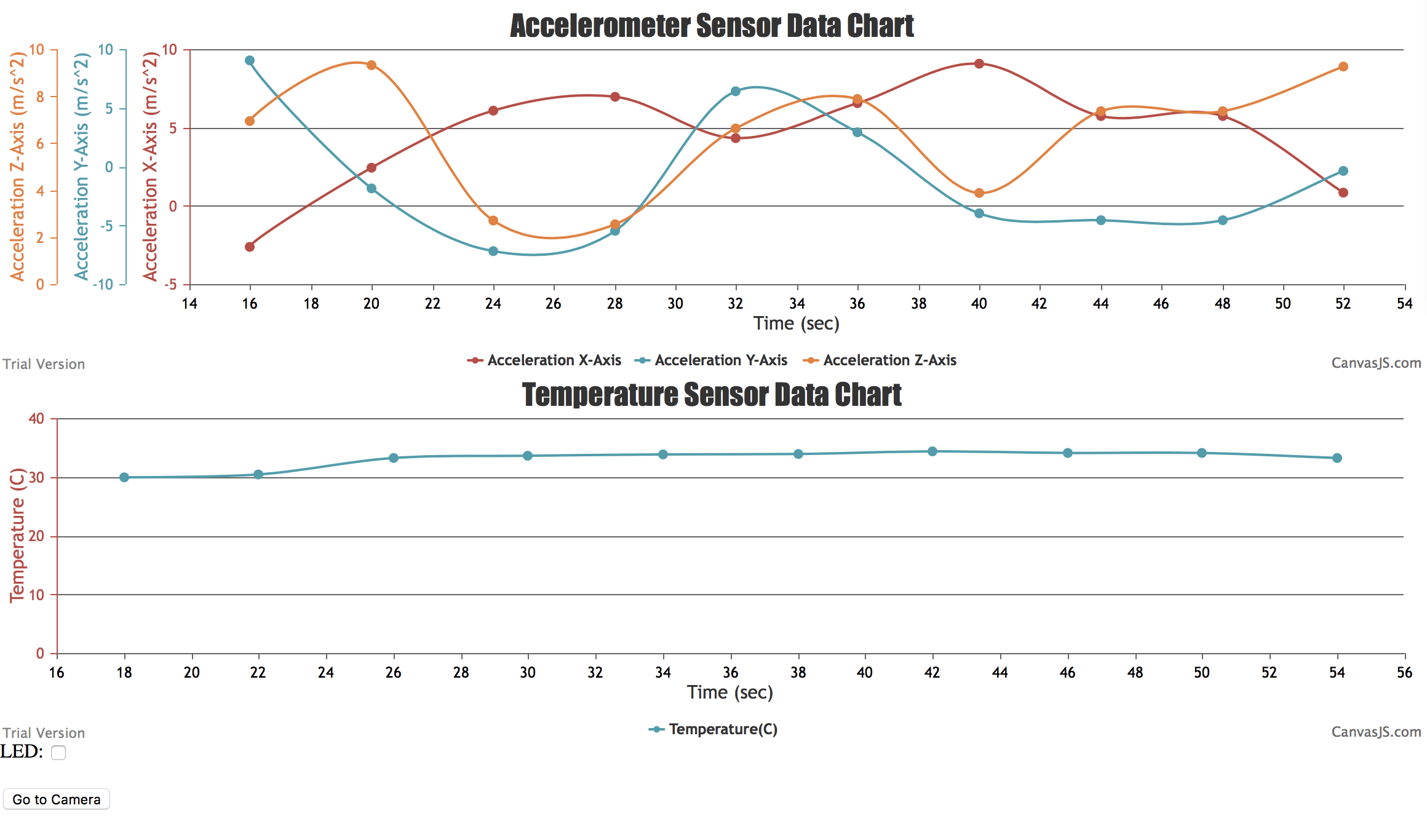
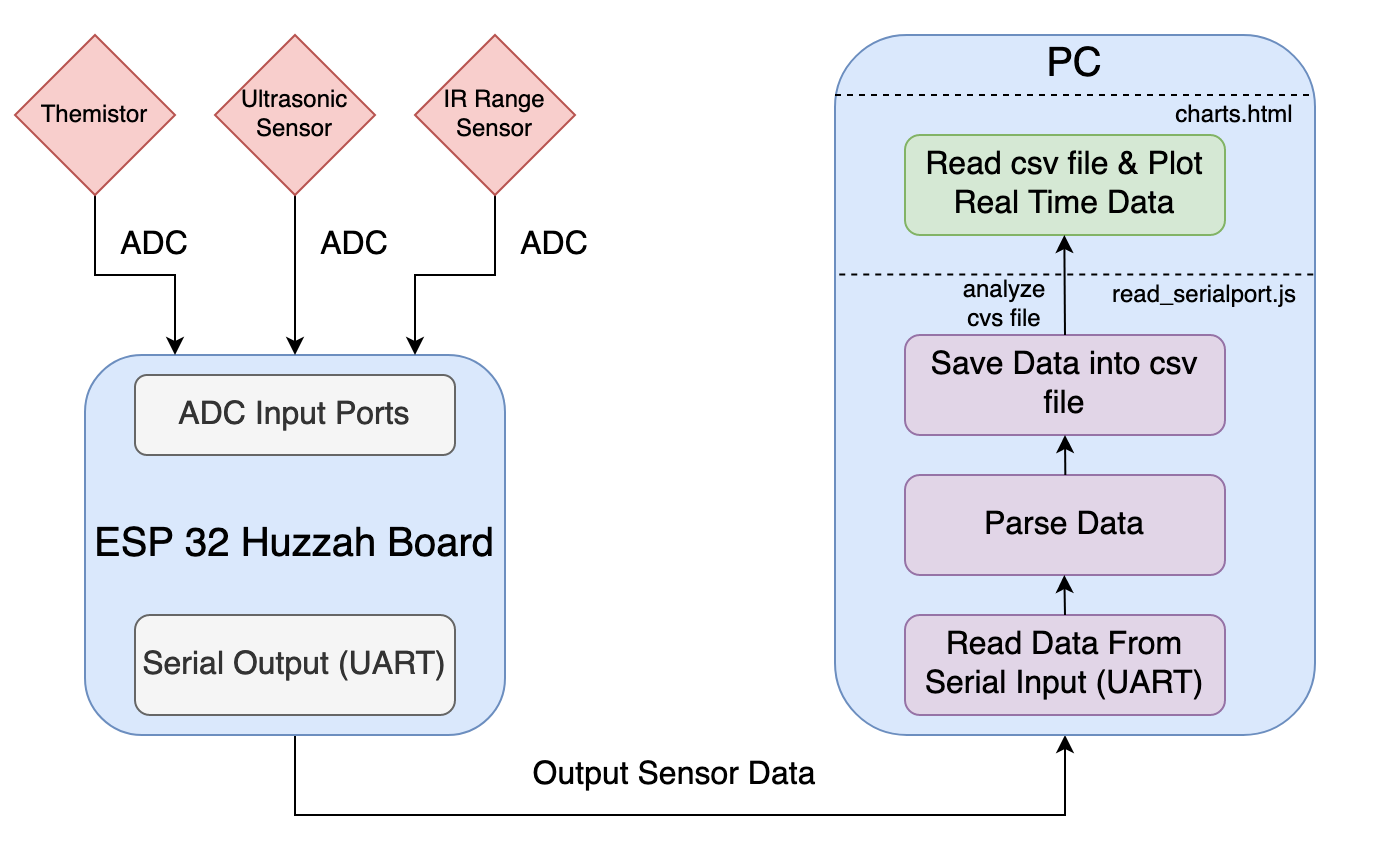
Smoothie Dispenser is a remote food drop system that consumers can use to drop smoothie onto smoothie container by pressing a remote button on their phone; afterwards, customers can obtain the smoothie from the smoothie container. The main process includes 5 steps: 1) place the smoothie container at smoothie drop zone. 2) observe the LIDAR distance and box location through WebCam. 3) observe the accelerometer data when stabilizes. 4) we click the drop button, and then the temperature decreases. 5) the customer can take the smoothie away.
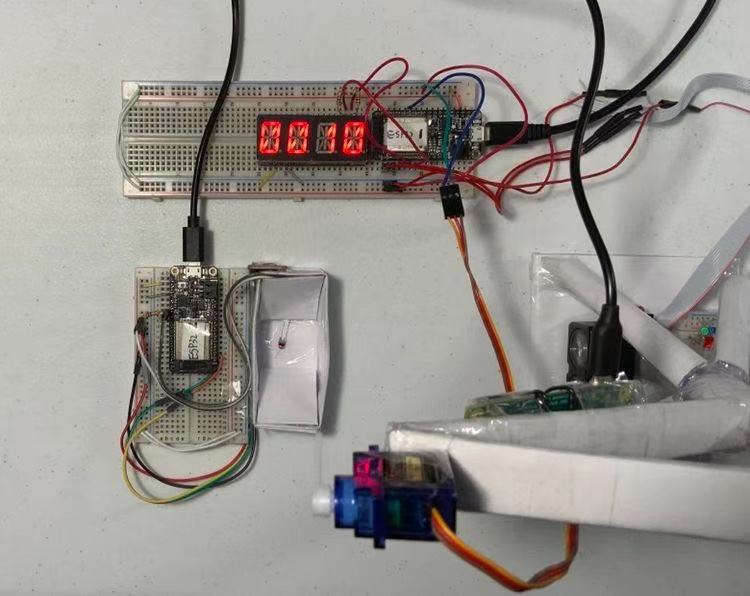
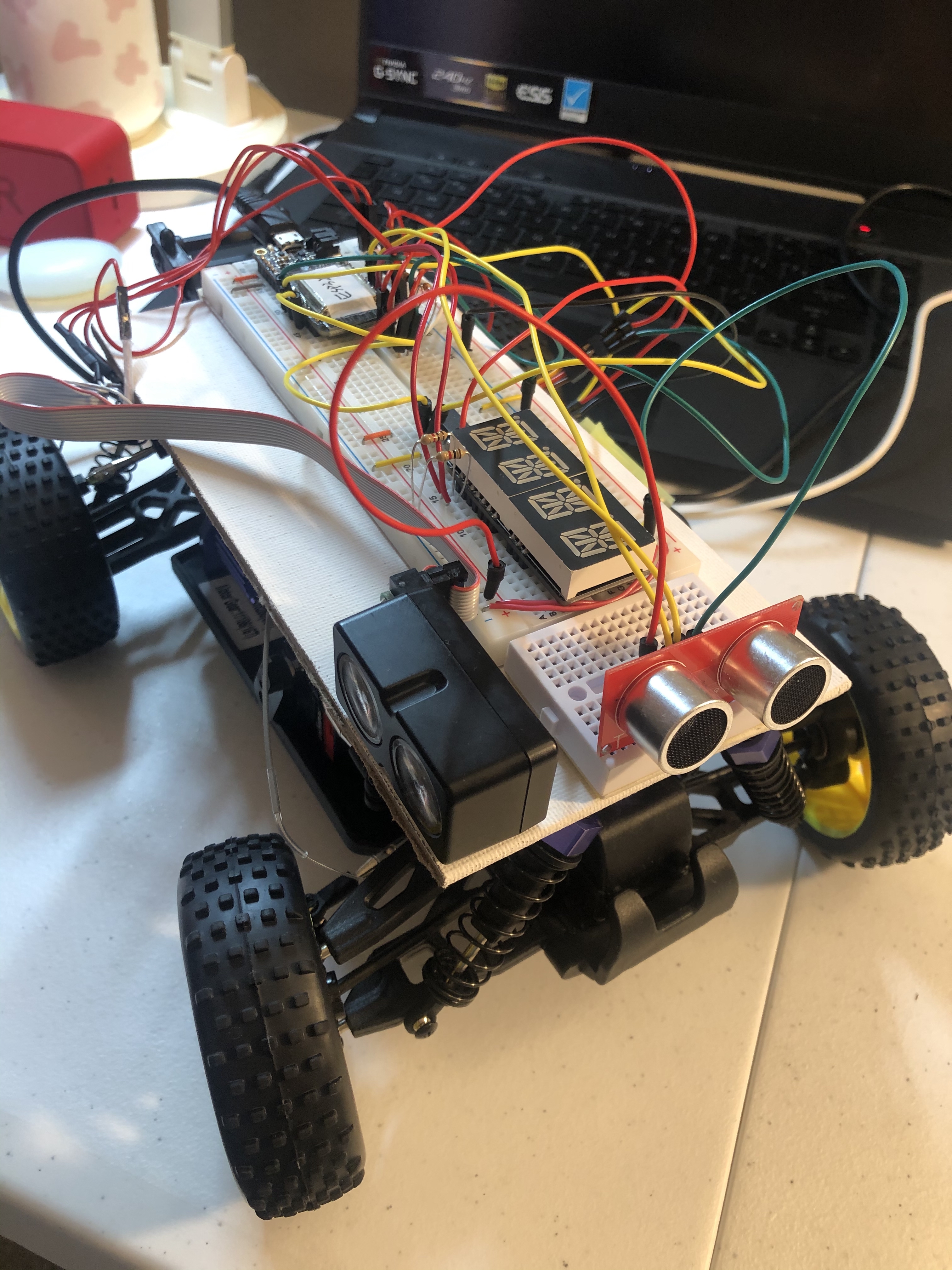
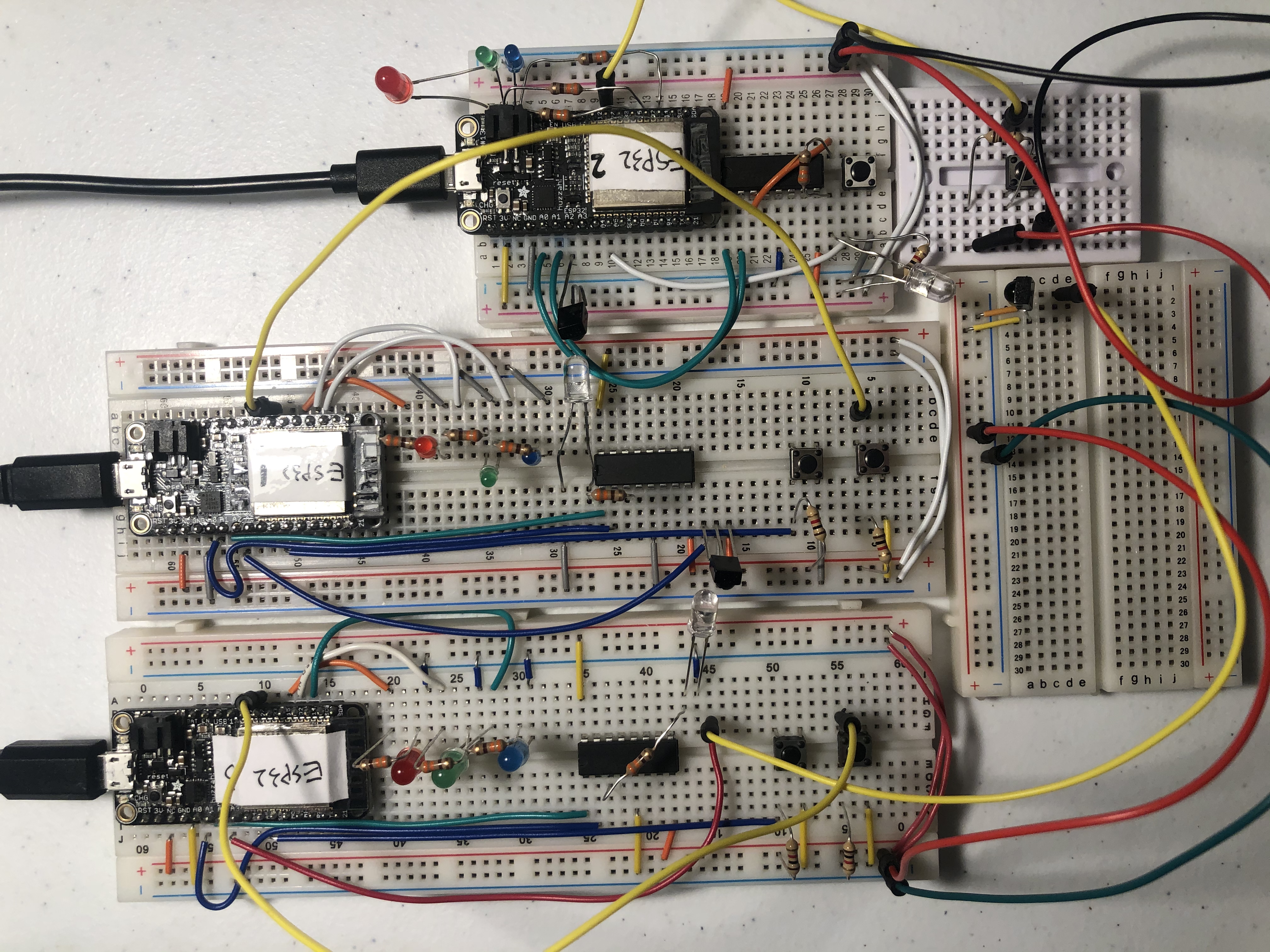
We use 2 actuators, 3 sensors and a RPI WebCam to implement this dispensing system. We used a servo for dropping food, a LIDAR sensor for determining the distance between the drop zone and the food container, an alphanumeric display for displaying the LIDAR value, a thermistor for determining the smoothie temperature and an accelerometer for determine if the food container is being moved or staying still.